{kind=link}
{kind=link}





{kind=link}
{kind=link}
{kind=link}
{kind=link}



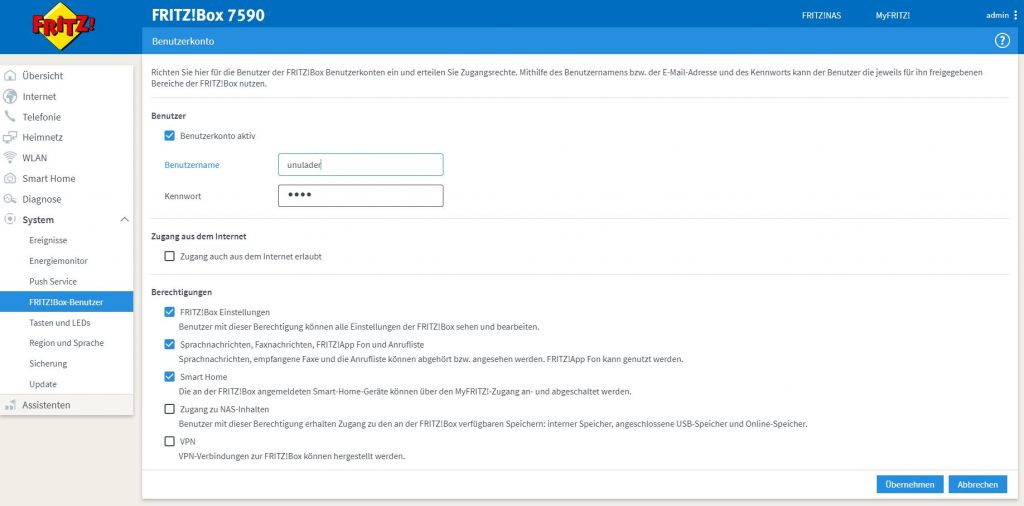
So muss der Benutzer auf der Fritzbox angelegt. Alle Berechtigungen genau so einstellen. Die hier gezeigten Usernamen, Passwörter sind frei gewählt.
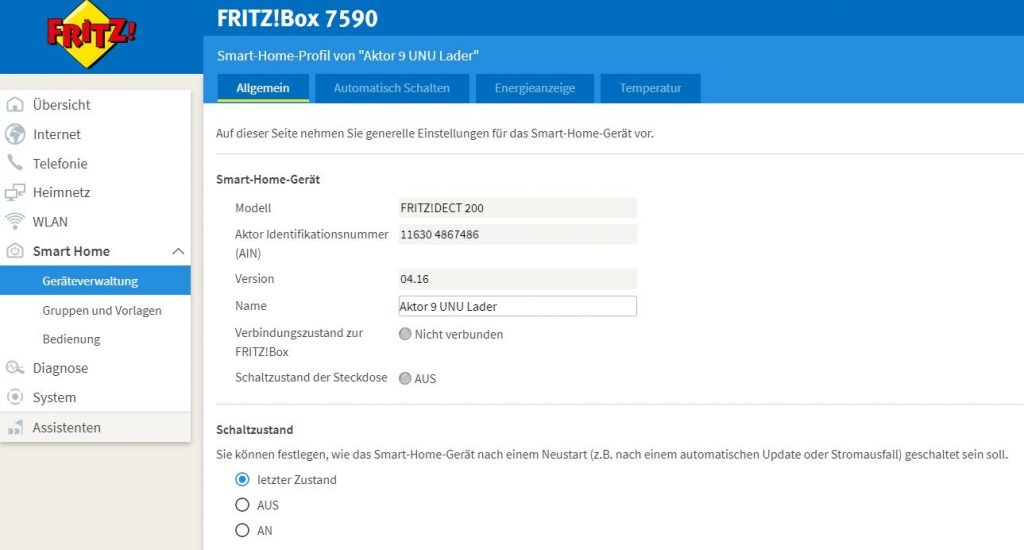
An der Fritzbox den richtigen Autor (Fritz!DECT200) ermitteln und die AIN merken.
Auf dem Raspberry ein aktuelles Raspberry PI OS installieren.
Update mit „sudo apt-get update“ durchführen
Upgrade mit „sudo apt-get upgrade“ durchführen
Die vier Dateien aus der ZIP ( unu_v2.zip ) entzippen und in das Verzeichnis vom PI kopieren.
- In jeder der drei Dateien (on.sh , off.sh , read.sh) die Einträge FPF, User, Pass und AIN editieren)
- Wenn man nun .\read.sh ausführt, muss man die Leistung des Steckdosenaktors angezeigt bekommen. Mit .\on.sh und .\off.sh kann man die Steckdose ein- und ausschalten
Die Datei „uno.py“ ist das Hauptprogramm und wird über einem Eintrag in der crontab zyklisch jede Minute aufgerufen. Einfach „crontab -e“ eingeben und am untersten Ende eine neue Zeile mit dem Inhalt
„* * * * * /usr/bin/python /home/pi/unu.py“
einfügen. Die fünf Sterne am Anfang bedeuten, dass die Datei jede Minute in jeder Stunde, an jedem Tag gestartet werden soll.
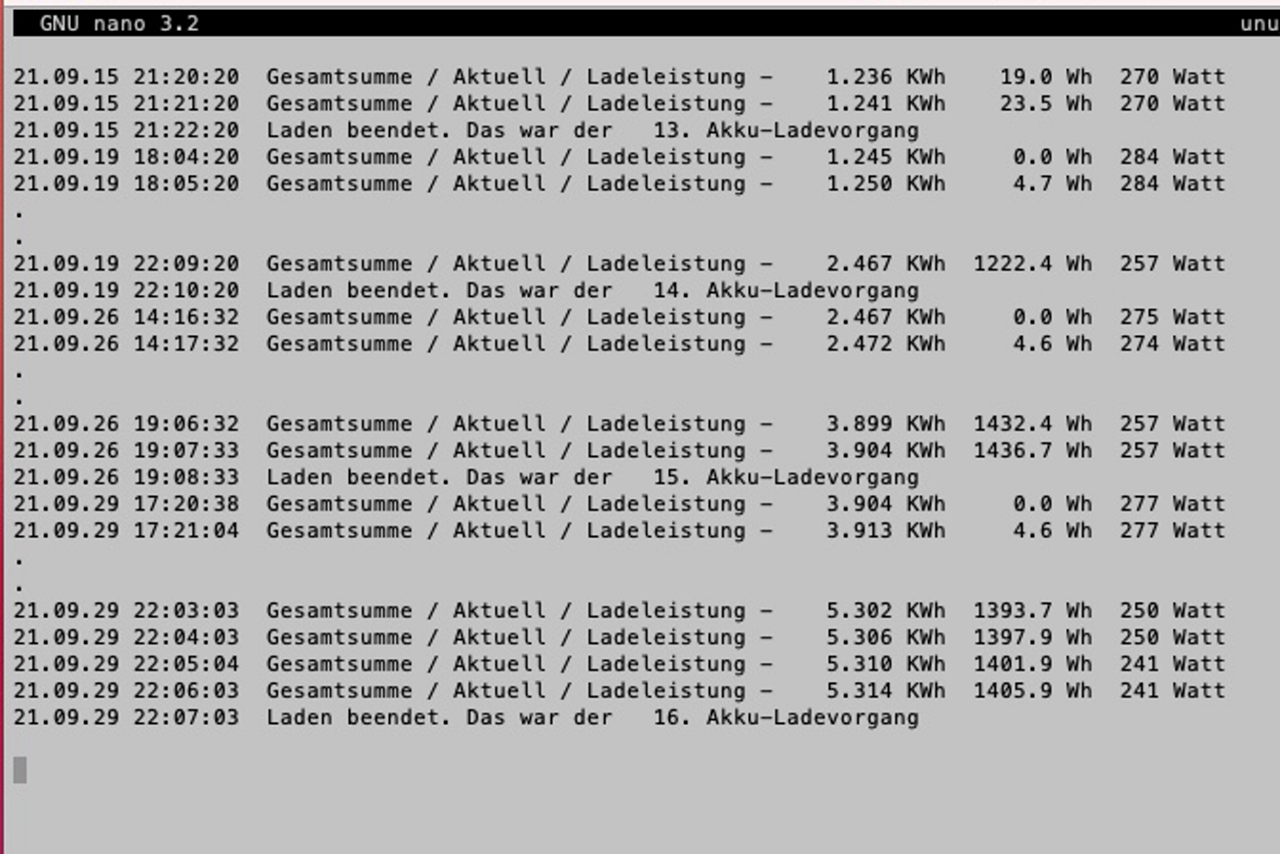
Wenn man die Fritz!DECT200 nun ohne angeschlossenen Lader ansteckt und mit dem lokalen Taster „ein“ schaltet muss diese nach etwa einer Minute wieder ausgehen. Grund: Die Leistung liegt unter 250 Watt und somit wird die Steckdose abgeschaltet !
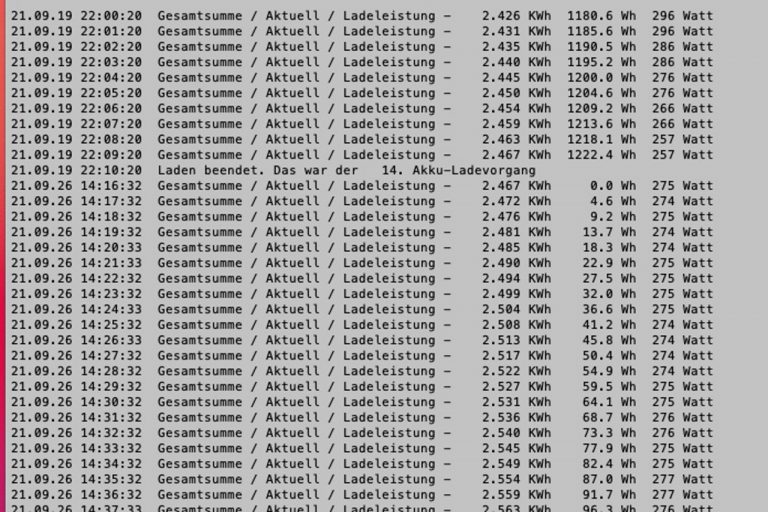
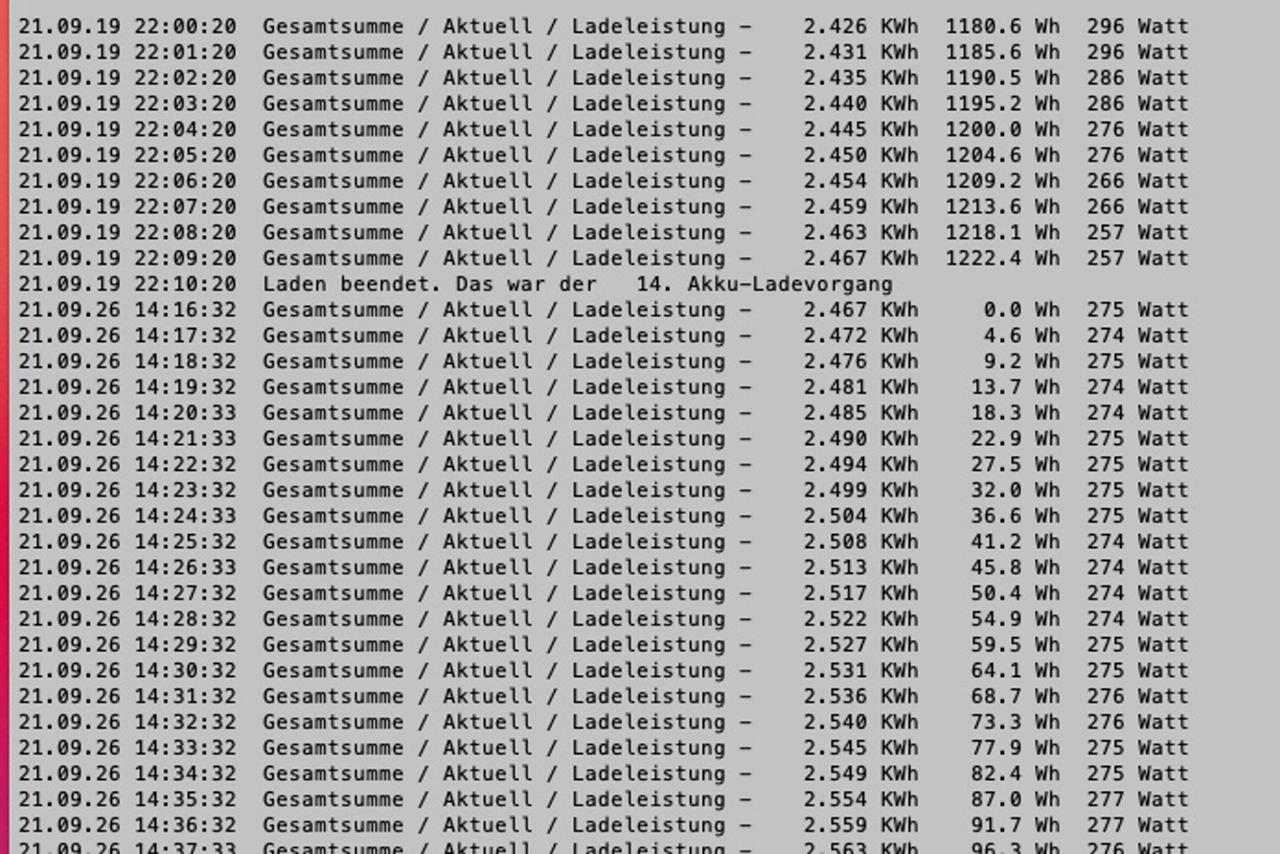
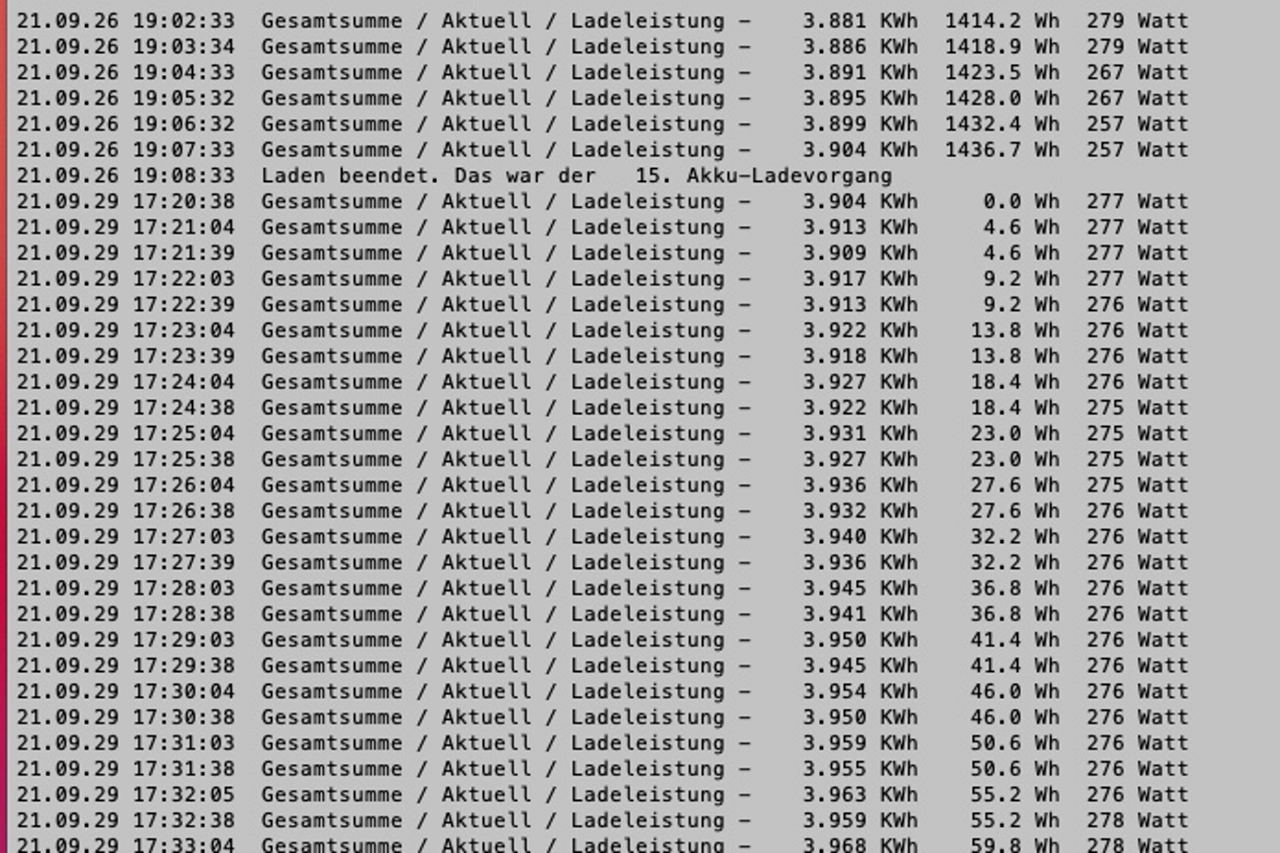
Ladegerät mit aufgelegtem Akku ist angeschlossen. Nach dem „ein“ bleibt die Steckdose an und protokolliert die Ladeleistung in der Datei „unu.log“ mit Datum und Zeit.
In dieser ZIP Datei (unu_v2.zip – neue Version 2) befinden sich die vier notwendigen Dateien on.sh, off.sh, read.sh und und.py. Die Datei on.sh wird nicht verwendet, da ja der Lader immer von Hand gestartet wird. Wer will, kann hier auch einen automatischen Start um eine bestimmte Zeit realisieren. Wenn man immer erst im 8 Uhr loswill, würde es ausreichen das Laden um 1 Uhr in der Nacht zu starten !
Viel Spaß bei eigenen Ideen.









So muss der Benutzer auf der Fritzbox angelegt. Alle Berechtigungen genau so einstellen. Die hier gezeigten Usernamen, Passwörter sind frei gewählt.
An der Fritzbox den richtigen Autor (Fritz!DECT200) ermitteln und die AIN merken.
Auf dem Raspberry ein aktuelles Raspberry PI OS installieren.
Update mit „sudo apt-get update“ durchführen
Upgrade mit „sudo apt-get upgrade“ durchführen
Die vier Dateien aus der ZIP ( unu.zip ) entzippen und in das Verzeichnis vom PI kopieren.
- In jeder der drei Dateien (on.sh , off.sh , read.sh) die Einträge FPF, User, Pass und AIN editieren)
- Wenn man nun .\read.sh ausführt, muss man die Leistung des Steckdosenaktors angezeigt bekommen. Mit .\on.sh und .\off.sh kann man die Steckdose ein- und ausschalten
Die Datei „uno.py“ ist das Hauptprogramm und wird über einem Eintrag in der crontab zyklisch jede Minute aufgerufen. Einfach „crontab -e“ eingeben und am untersten Ende eine neue Zeile mit dem Inhalt
„* * * * * /usr/bin/python /home/pi/unu.py“
einfügen. Die fünf Sterne am Anfang bedeuten, dass die Datei jede Minute in jeder Stunde, an jedem Tag gestartet werden soll.
Wenn man die Fritz!DECT200 nun ohne angeschlossenen Lader ansteckt und mit dem lokalen Taster „ein“ schaltet muss diese nach etwa einer Minute wieder ausgehen. Grund: Die Leistung liegt unter 250 Watt und somit wird die Steckdose abgeschaltet !
Ladegerät mit aufgelegtem Akku ist angeschlossen. Nach dem „ein“ bleibt die Steckdose an und protokolliert die Ladeleistung in der Datei „unu.log“ mit Datum und Zeit.
In dieser ZIP Datei (unu.zip Version 1) befinden sich die vier notwendigen Dateien on.sh, off.sh, read.sh und und.py. Die Datei on.sh wird nicht verwendet, da ja der Lader immer von Hand gestartet wird. Wer will, kann hier auch einen automatischen Start um eine bestimmte Zeit realisieren. Wenn man immer erst im 8 Uhr loswill, würde es ausreichen das Laden um 1 Uhr in der Nacht zu starten !
Nach dem Update der Fritzbox auf Fritz OS 7.50 (Jan. 2023) und höher ist diese geänderte ZIP Datei notwendig, damit die FritzDECT ausgelesen werden kann.
Viel Spaß bei eigenen Ideen.